
Computador de controle de voo
Eis aqui outra parte fundamental do multicóptero (reparou que tudo que foi falado até agora é “fundamental”, certo?).
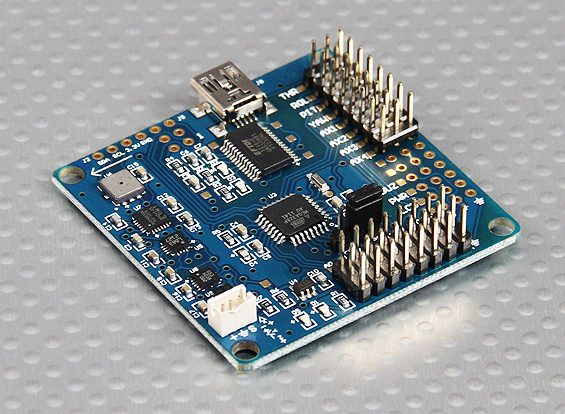
O Computador de Controle de Voo (Flight Controller Computer, ou simplesmente FC), é uma plaquinha de circuito dotada de um processador, memória, um software de controle de voo, alguns sensores (pelo menos um giroscópio e um acelerômetro), e alguns terminais de controle para os ESCs dos motores.
Este aparelho, como o nome diz, serve para controlar o voo. Ele faz isso recebendo as “Entradas” de diversas fontes, e como resposta, controla a velocidade de cada motor.
O FC recebe do receptor de rádio os comandos dos 4 eixos de controle de atitude (Arfagem, Rolagem, Guinada e Potência), soma a estes comandos a situação atual de voo (lendo os dados do giroscópio, e de outros instrumentos como acelerômetro, bússola, gps, etc) e traduz esses comandos em mais ou menos potência para cada motor.
Existem diversos FCs no mercado, cada um possui características, finalidades e custos distintos. Vou detalhar abaixo algumas características que você deve observar antes de escolher:
Firmware
Firmware é o “software” que roda no Flight Controller. Ele é que vai determinar o que seu drone será capaz de fazer. Cada placa é capaz de rodar um firmware diferente, então você sempre escolhe primeiro o Firmware que você quer, para depois escolher a placa. Os Firmwares mais comuns são os seguintes:
- Cleanflight (ou BaseFlight, BetaFlight, RaceFlight) – O BaseFlight foi um dos primeiros Firmwares para processadores STM32. Foi criado a partir do MultiWii (que era um Firmware para processadores de 8-Bit). Dominic Clifton então criou o CleanFlight a partir do BaseFlight, melhorou diversos aspectos de seus predecessores e hoje em dia é o Firmware mais utilizado em controladores de 32-bit. O BetaFlight e o RaceFlight são “filhos” do CleanFlight. O primeiro serve para “testar” novas funcionalidades que serão adicionadas ao CleanFlight no futuro, e o segundo é uma versão “extremamente reduzida” do CleanFlight para ser utilizada exclusivamente em drones de corrida.O CleanFlight roda em diversas placas controladoras baseadas em processadores STM32. Algumas delas são: SP Racing F3, Naze32, Afro32, CC3D, Lux, entre outras.O CleanFlight é um Firmware de uso geral. É mais utilizado em Drones de corrida e de freestyle (acrobacias), mas possui modos de voo estabilizado e alguns recursos bem legais para controlar leds, caixa preta e OSD.
Por ser de código aberto (open source), o CleanFlight possui literalmente centenas de outros “forks” (Firmwares criados a partir dele). Um deles é o iNav, que é basicamente o CleanFlight com opções piloto automático adicionadas. Ele roda nas mesmas placas em que o CleanFlight roda.
- LibrePilot (ou OpenPilot) – O LibrePilot foi criado a partir do OpenPilot. Ambos são projetos de código livre (Open Source).
Trata-se de um Firmware usado principalmente nas placas CC3D e CC3D Revolution. É um controlador de voo de uso geral que é usado principalmente em missões (quando o computador pilota o drone de forma autônoma), mas pode ser usado também em mini drones acrobáticos. Um diferencial é que este Firmware possui telemetria nativa (usando OPLink), o que facilita a comunicação entre o drone e a estação em terra (Ground Station). - ArduCopter – O ArduCopter é um dos subprojetos do ArduPilot – Também Open Source. É um dos primeiros firmwares criados para navegação autônoma de aeronaves, sendo que o suporte a aeronaves multi-rotor foi adicionado posteriormente. Este firmware roda nas placas APM (de 8-bit) e Pixhawk (de 32-bit). Apesar de ser de uso geral, é mais indicado para drones de fotografia e filmagem aérea, e não é indicado para uso em corridas e acrobacias (embora possa ser usado para isso). Possui recursos para executar missões complexas (piloto automático), bem como modos de voo estabilizado.
Processador
Especialmente para o CleanFlight e LibrePilot, existem diversos tipos de processadores. Cada placa utiliza um processador, e o tipo de processador vai permitir que o firmware execute funcionalidades específicas.
- ATMega 2560 – É um microcontrolador de 8 bits, utilizado na APM para rodar o ArduCopter. Possui apenas 32 MIPS de capacidade (Milhões de instruções por segundo), roda a 16 MHz. No ArduCopter 2.8 este processador está no limite de sua capacidade, mas cumpre bem o seu papel.
- STM32F1 – É um microcontrolador de 32 bits utilizado por diversas controladoras, entre elas a Naze32, a Afro32 e a CC3D. Possui capacidade de 90 MIPS e funciona a 72Mhz. Normalmente são mais do que suficientes para executar todas as funções do CleanFlight.
- STM32F3 – É um microcontrolador muito parecido com o STM32F1, pois também funciona a 72Mhz. A diferença é que possui um co-processador matemático que agiliza as instruções de ponto-flutuante, e possui uma porta UART adicional. Roda todas as funções do CleanFlight com folga, e ainda permite adicionar mais recursos, como Telemetria, OSD, Blackbox, Leds, Bluetooth e rádios com SBUS sem a necessidade de um inversor.
- STM32F4 – Um microcontrolador mais rápido, roda a 180 Mhz e tem 210 MIPS. As placas que usam este processador são a CC3D Revolution, Falcon F4 e Sparky V2. Rodam com folga o LibrePilot com todos os recursos. Também rodam o CleanFlight.
Soluções fechadas
Existem Flight Controllers que funcionam com software e hardware proprietário. As mais famosas são a Naza da DJI – indicada para uso geral, fotografia e filmagem e missões autônomas, e a KISS da Flyduino, que é indicada para drones de corrida e acrobacias. Não vou detalhar o funcionamento destes.
Muito bom esse site !!
Obrigado amigo! Quando construir o seu drone me avise!
Amigo Vc poderia me ajudar , como construir (peças e fornecedores) este computador de navegação (“um pequeno computador eletrônico, ….entre outros”). Moro num local onde as pessoas costumam colocar fogo na vegetação, quando não cai um balão, aí quando Vc menos espera aparece um fogaréo e acaba queimando tudo, nossas arvores e roça inclusive…. fazemos uma barreira de terra nua , mas para que possamos visualizar o fogo antes de chegar a nós (tamanho, localização) precisamos de um quadricoptero possante. Pode nos ajudar?
Excelente . Esse artigo para pessoas que não tem nenhum conhecimento foi esclarecedor , me ajudou a entender quais caminhos devo seguir para chegar no meu primeiro drone. Muito obrigado!
Salve, amigo! Muito obrigado por este trabalho bastante elucidativo e de boa didatica! Te pergunto: se vc fosse montar um racer 250 e, eventualmente instalar um gimbal e um modulo GPS, qual FC, firmware e fork vc escolheria supondo um orcamento sem limites. Abs! Adoro motos, tenho uma 2T e outra 4T.
250 com Gimbal? Acho que não vai ficar muito bom amigo. Vai ficar pesado.
Eu vejo que você está tentando montar um “Mavic”… Drone pequeno com estabilização de imagem. Neste caso, recomendaria um frame de 280, que te permite usar hélices de 6 com folga.
Quanto a pergunta: Controladora SP Racing F3 Deluxe (boa e barata) com firmware iNavFlight.
Boa tarde!!!
Estou apanhando para instalar um gimbal num F330. Ou coloco bateria ou o gimbal, alguma sugestão?
Sou iniciante nessa área de drones, meu conhecimento e muito vago por enquanto, ainda quero expandir ainda mais, porém preciso de um norte para onde deve começar, oque voce me recomenda?
Obs: estou pensando em montar um drone racing ou compra um kit pronto.
Parabéns pelo ótimo trabalho,
Sou novo nesse hobby e estou querendo montar meu primeiro drone mas tenho várias dúvidas uma delas é sobre o modo Headless esse modo vem em todas controladora para f450 ou não existe esse modo em f 450 ? Desde já agradeço e perdoe minha ignorância como eu disse sou novo kk