
Controlador eletrônico de velocidade (ESC)
O ESC (Electronic Speed Controller) ou controlador eletrônico de velocidade também é parte fundamental nos multicópteros. Sem ele, o computador de controle de voo não conseguirá controlar a velocidade de cada motor.
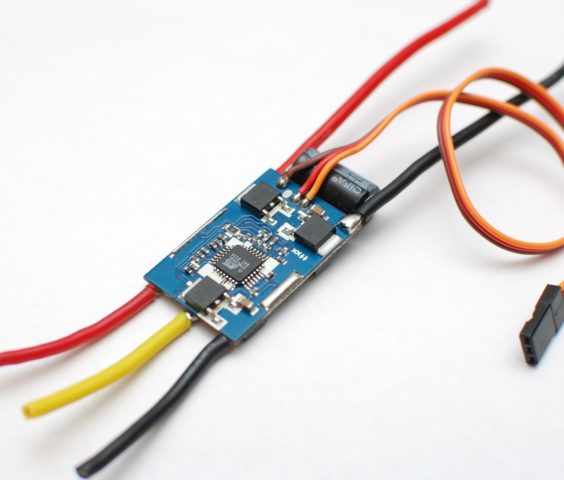
O ESC é ligado diretamente ao motor (cada motor precisa ter seu próprio ESC), e também vai ligado à bateria do veículo, e o papel dele é regular a tensão (voltagem) com que a bateria alimenta o motor, além de controlar a fase (pois motores sem escovas dependem de controle de fase externo). Quem controla o funcionamento do ESC é o computador de controle de voo (Flight Controller, ou simplesmente “FC”).
Os ESCs possuem uma corrente máxima especificada. Nos F450 por exemplo, o fabricante recomenda de 15 a 25A (Amperes). Vimos no tópico de motores que o motor recomendado pelo fabricante (2212 920KV), com a hélice 10×4,5 e bateria 3S consome até 13.4 Amperes, portanto um ESC de 15A já é suficiente neste caso.
Sempre escolha um ESC com capacidade MAIOR do que a especificada pelo fabricane do motor. ESC subdimensionado pode queimar durante o voo. No entanto, é bom não superdimensionar o ESC também. Além do ESC ser mais caro, ele é mais pesado, e em uma aeronave economizar peso é sempre bom. Então procure um ESC de 10 a 20% maior do que o necessário.
Um multicóptero bem ajustado pode pairar no ar usando apenas 40 a 50% da potência dos motores, o que significa que a capacidade máxima do ESC está longe disso. Porém, é importante que o ESC aguente picos de potência que são comuns durante o uso.
Existem 2 tipos de ESC no mercado: Os BEC e os OPTO, e é importante entender a diferença entre os 2 na hora de escolher, pois aos olhares menos atentos, ambos são iguais.
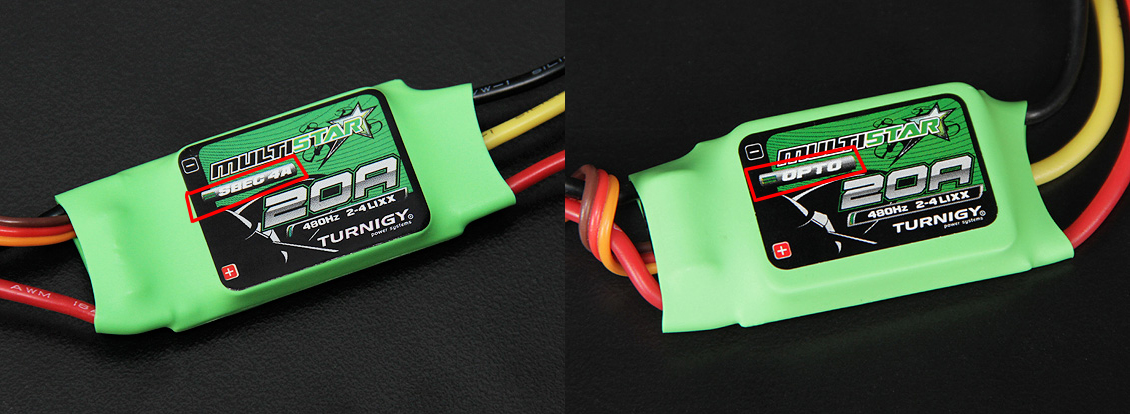
ESC BEC
BEC significa “Battery Eliminator Circuit”, ou Circuito Eliminador de Bateria em português. Em um multicóptero, não são apenas os motores que demandam energia elétrica. O computador de controle de voo, o rádio, a câmera e o transmissor de FPV, o Gimbal, e tantos outros acessórios que podem ser embarcados na aeronave também precisam de alimentação elétrica.
A bateria do multicóptero geralmente possui tensão diferente da que estes componentes usam, e esta tensão muda constantemente durante o voo, afinal a bateria está sendo consumida. A maioria dos circuitos eletrônicos funciona com tensão de 5V, e as baterias fornecem 7.4V (2S), 11.1V (3S) e 14.8V (4S).
O BEC tem a função de converter esta tensão maior da bateria em uma tensão constante de 5V (ou 12V em alguns casos). E assim alimenta o computador de controle de voo (FC), o Rádio (RX) e outros eletrônicos embarcados no aeromodelo.
Os ESCs que possuem BEC portanto possuem dupla função: Alimentar o motor e alimentar o computador de voo e outros eletrônicos embarcados no multicóptero.
ESC OPTO
Já os ESCs do tipo OPTO não possuem um BEC, portanto, não são capazes de alimentar os eletrônicos da aeronave, ficando apenas com a tarefa de alimentar o motor ao qual está ligado.
Ao optar usar ESCs do tipo OPTO no seu aeromodelo, você vai precisar providenciar uma alternativa para alimentar os eletrônicos embarcados na aeronave, e isso normalmente é feito usando um UBEC.
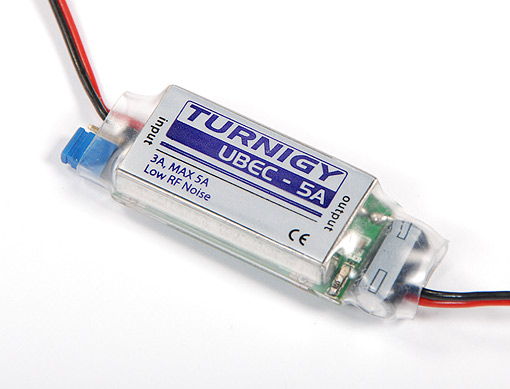
O UBEC é um circuito dedicado exclusivamente a tarefa de converter a tensão de entrada (de 2S até 6S, em alguns casos até mais) em uma tensão apropriada para os eletrônicos (5V ou 12V em alguns casos). Ele é mais eficiente do que o BEC dos ESCs pois a conversão feita pelo BEC elimina o excesso de tensão gerando calor (o que desperdiça energia), enquanto que a conversão feita pelo UBEC usa um regulador mais eficiente.
O custo de um UBEC é muito baixo, então normalmente não compensa usar ESCs com BEC, sendo sempre preferível usar sempre ESCs do tipo OPTO. A não ser que seu drone seja muito pequeno e portanto complicado para encontrar espaço para um UBEC… Neste caso, um ESC com BEC integrado pode economizar algum espaço (e peso) na aeronave.
Outra forma de alimentar os eletrônicos do aeromodelo é utilizando uma placa de distribuição de energia com BEC integrado (PDB – Power distribuition Board).
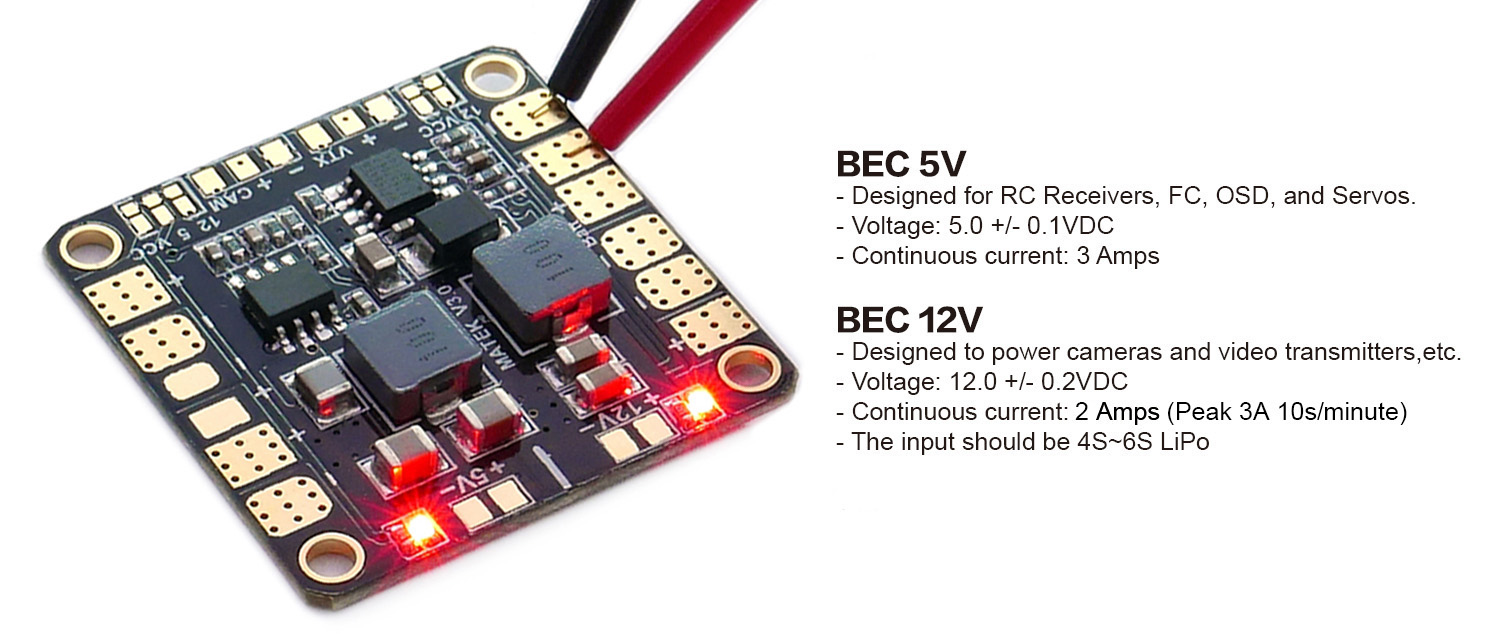
Se o seu frame não tem PDB integrada (a maioria dos frames de carbono não tem), você pode usar uma PDB como esta. Ela fornece pontos de conexão para os 4 ESCs, para a bateria, para o transmissor de vídeo, câmera, e fornece uma saída de 5V e outra de 12V. A maioria dos mini-drones para FPV utiliza uma PDB com BEC.
Existem mais diferenças entre um ESC BEC e um ESC OPTO. O ESC BEC faz o controle da tensão enviada aos motores através de um microcontrolador, enquanto o OPTO usa um sensor ótico para isso – que é mais eficiente e gera menos calor. A diferença é que o ruído gerado na corrente elétrica não passa pelo sensor ótico, o que significa energia mais estável no aparelho e menos interferência com outros circuitos (especialmente os analógicos, como o transmissor de vídeo FPV).
Muito bom esse site !!
Obrigado amigo! Quando construir o seu drone me avise!
Amigo Vc poderia me ajudar , como construir (peças e fornecedores) este computador de navegação (“um pequeno computador eletrônico, ….entre outros”). Moro num local onde as pessoas costumam colocar fogo na vegetação, quando não cai um balão, aí quando Vc menos espera aparece um fogaréo e acaba queimando tudo, nossas arvores e roça inclusive…. fazemos uma barreira de terra nua , mas para que possamos visualizar o fogo antes de chegar a nós (tamanho, localização) precisamos de um quadricoptero possante. Pode nos ajudar?
Excelente . Esse artigo para pessoas que não tem nenhum conhecimento foi esclarecedor , me ajudou a entender quais caminhos devo seguir para chegar no meu primeiro drone. Muito obrigado!
Salve, amigo! Muito obrigado por este trabalho bastante elucidativo e de boa didatica! Te pergunto: se vc fosse montar um racer 250 e, eventualmente instalar um gimbal e um modulo GPS, qual FC, firmware e fork vc escolheria supondo um orcamento sem limites. Abs! Adoro motos, tenho uma 2T e outra 4T.
250 com Gimbal? Acho que não vai ficar muito bom amigo. Vai ficar pesado.
Eu vejo que você está tentando montar um “Mavic”… Drone pequeno com estabilização de imagem. Neste caso, recomendaria um frame de 280, que te permite usar hélices de 6 com folga.
Quanto a pergunta: Controladora SP Racing F3 Deluxe (boa e barata) com firmware iNavFlight.
Boa tarde!!!
Estou apanhando para instalar um gimbal num F330. Ou coloco bateria ou o gimbal, alguma sugestão?
Sou iniciante nessa área de drones, meu conhecimento e muito vago por enquanto, ainda quero expandir ainda mais, porém preciso de um norte para onde deve começar, oque voce me recomenda?
Obs: estou pensando em montar um drone racing ou compra um kit pronto.
Parabéns pelo ótimo trabalho,
Sou novo nesse hobby e estou querendo montar meu primeiro drone mas tenho várias dúvidas uma delas é sobre o modo Headless esse modo vem em todas controladora para f450 ou não existe esse modo em f 450 ? Desde já agradeço e perdoe minha ignorância como eu disse sou novo kk